Stanford EE259 I Radar antenna designs and characteristics I 2023 I Lecture 11
26 Jan 2024 · over 2 years ago
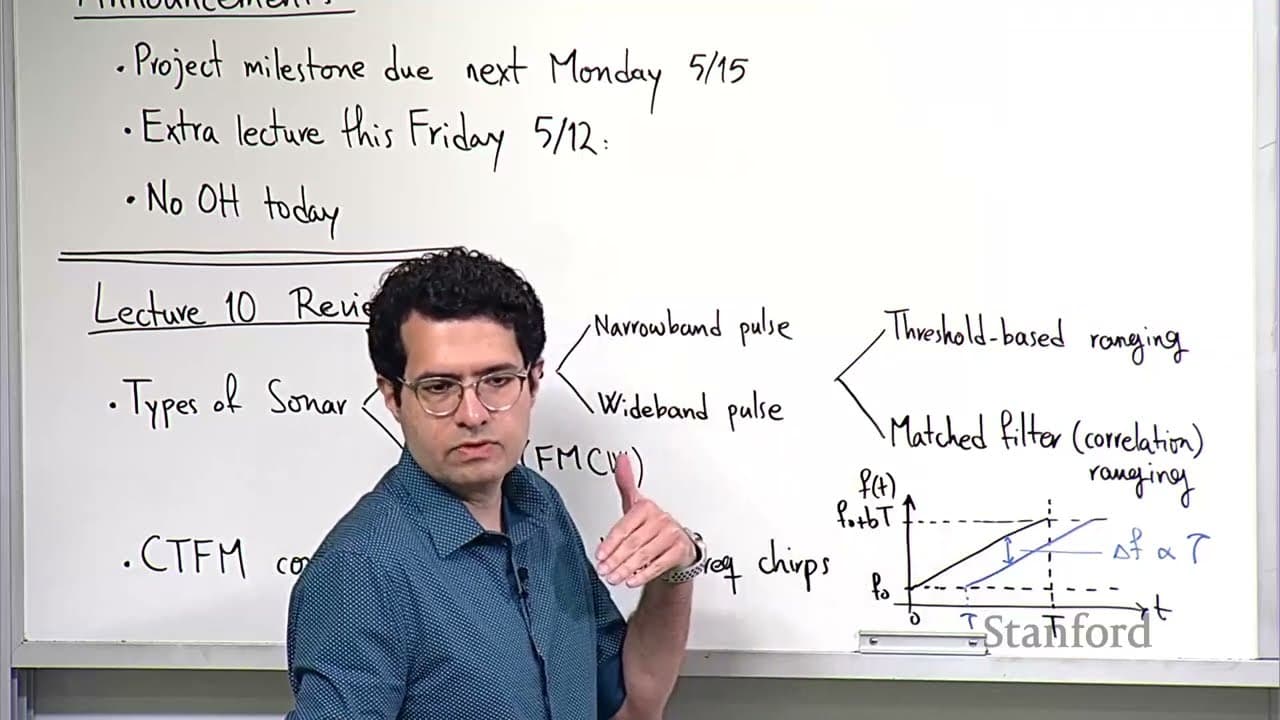
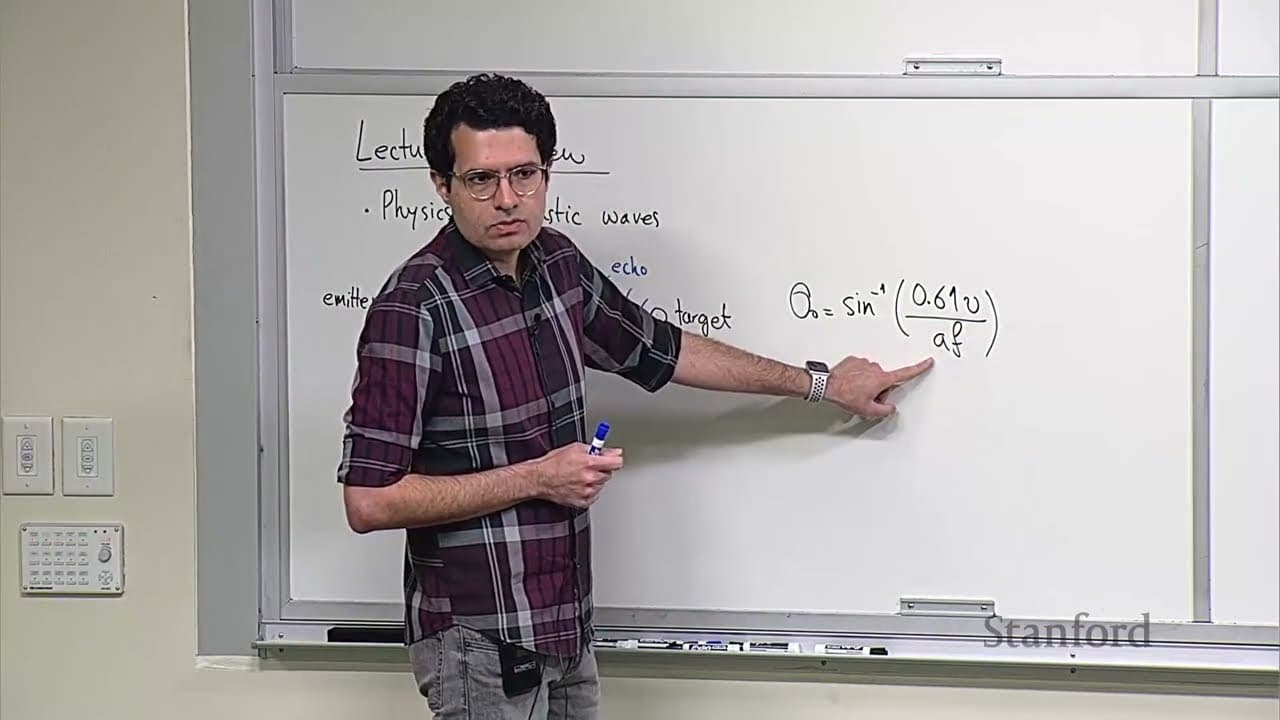
In this video, the speaker discusses the topic of sonar systems, specifically in the context of robotics. They cover various aspects of sonar, including the different types of sonar systems, such as pulse-echo sonar and frequency modulated continuous wave (FMCW) sonar. The speaker also discusses the range and angle estimation algorithms used in sonar systems, as well as the limitations and trade-offs involved. They highlight the importance of considering ego motion effects in sonar systems, as well as the potential for classification of targets based on DOA. The video concludes with a brief introduction to radar, noting its similarities and differences compared to sonar.
Browse more from
Stanford EE259 I Radar principle of operation & architectures (pulsed, FMCW, PMCW) I 2023 I Lec. 10
Stanford EE259 I Sonar ranging and bearing angle estimation I 2023 I Lecture 9

Stanford EE259 I Ultrasonic sensor (Sonar) principle of operation & architecture I 2023 I Lecture 8
Stanford EE259 I Gaussian beams, beam scanning techniques I 2023 I Lecture 16
Stanford EE259 I Inertial sensors: accelerometer principle of operation & architecture I 2023 I Lec5
Stanford EE259 I Photodetection principles (direct vs. coherent), lidar system arch. I 2023 I Lec 17
Ready to get started?
Save, summarize & chat with your content.
IT'S FREE
No credit card required · 30 Day Refund on Premium · 24 Hour Support